 Цивилизация
Цивилизация









Инженеры из Калифорнийского технологического института создали гибрид шагающего робота и летающего дрона. Статья об этом опубликована в журнале Science Robotics.
Робота назвали LEO, или полностью — LEONARDO, как сокращение от LEgs ONboaRD, «ноги на борту». Несмотря на это название, специалистам пришлось конструировать машину с нуля, чтобы добиться устойчивости в обоих режимах.
«В зависимости от типов препятствий, которые ему необходимо преодолеть, LEO может выбрать либо ходьбу, либо полет, либо их сочетание по мере необходимости.
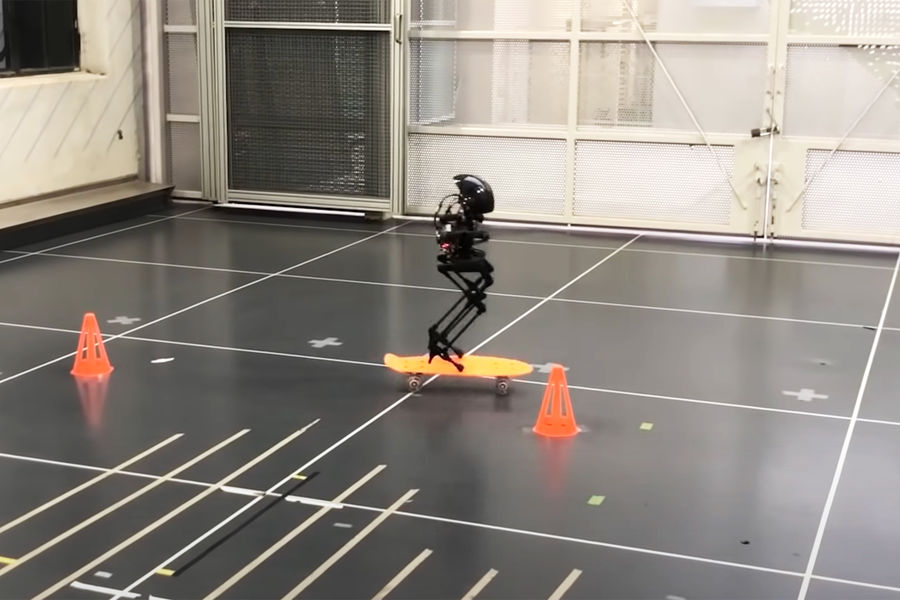
Кроме того, LEO умеет перемещаться таким образом, который доступен не всем людям, например, он ходит по канату и катается на скейтборде»,
— говорит Патрик Шпилер, один из создателей.
Но LEO создавали не для трюков. Разработчики надеются, что гибрид робота и дрона унаследует преимущества обоих типов машин, но будет лишен их недостатков. Шагающее шасси может нести большой вес, но им трудно управлять в реальных условиях: двуногие и четвероногие роботы были в свободной продаже с самого начала XXI века, но перемещаться они могли лишь по ровному полу.
Ходить по лестнице, снегу, траве, а также перешагивать препятствия роботов научили лишь несколько лет назад, наиболее известные примеры этого — человекоподобный ATLAS и собакоподобный SPOT от компании Boston Dynamics. Но даже для этих ловких машин отвесная стена или река станут непреодолимой преградой, а перемещение по завалам может быть опасным.
Летающему аппарату непроходимый ландшафт не помеха, и у него есть множество других преимуществ. С другой стороны, он потребляет много энергии, не так много может унести и, самое главное, для него проблематично взаимодействовать с наземными предметами там, где требуются серьезные усилия или большая точность. Дрону потребуется очень надежная стабилизация для того, чтобы закрутить гайку, а вбить гвоздь, скорее всего, не выйдет вовсе.
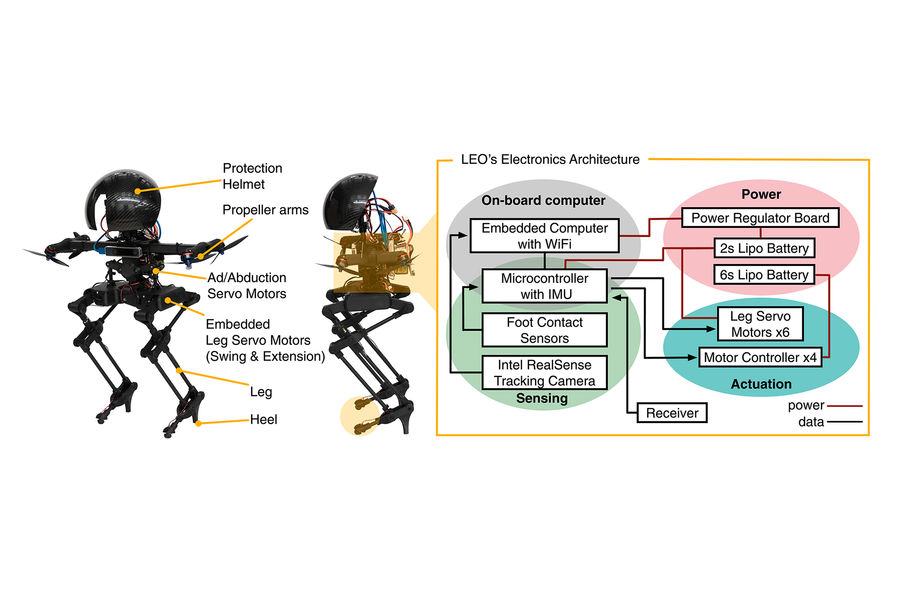
LEO весит 2,5 килограмма и достигает 75 сантиметров в высоту. Он ходит на двух ногах с тремя шарнирным суставами, а летает на четырех винтах, расположенных в районе плеч. Моторами для ног служат миниатюрные бесколлекторные электродвигатели с редуктором. Пятки ступней сделаны такими, что на них можно твердо стоять, без активного поддержания равновесия. На борту робота есть батарея, бортовой компьютер, Wi-Fi для связи с оператором, датчики касания земли и камера для навигации. «Голову» LEO, на случай падений, защищает специальный шлем. Винты используются не только для полета, но и для поддержания равновесия, за счет чего робот и может ходить по канату.
Ученые говорят, что свою концепцию они взяли из живой природы — их вдохновили птицы, которые совмещают умение летать с уверенной ходьбой.
LEO, однако, всего лишь прототип, созданный для доказательства реалистичности концепции гибридного аппарата. В будущем на «потомков» LEO можно будет возложить сложные или опасные работы, такие как осмотр и ремонт поврежденной инфраструктуры, установка нового оборудования в труднодоступных местах или оказание помощи при стихийных бедствиях и промышленных авариях. Авторы не отрицают, что такого робота можно будет применять и в военных целях.
В дальнейшем команда планирует улучшить LEO, придав большую прочность конструкции ног, которая сможет выдержать увеличенный вес, а также усилить тягу двигателей. Кроме того, они надеются сделать LEO более автономным, чтобы робот мог понимать, какая часть его веса поддерживается ногами, а какая — винтами при ходьбе по неровной местности.
Исследователи также планируют оснастить LEO недавно разработанным алгоритмом управления посадкой дронов, основанным на самообучающейся нейронной сети. Обладая более глубоким пониманием окружающей среды, LEO сможет принимать собственные решения относительно наилучшего сочетания ходьбы, полета или гибридного движения для перемещения из одной точки в другую с оптимальными затратами времени и энергии.